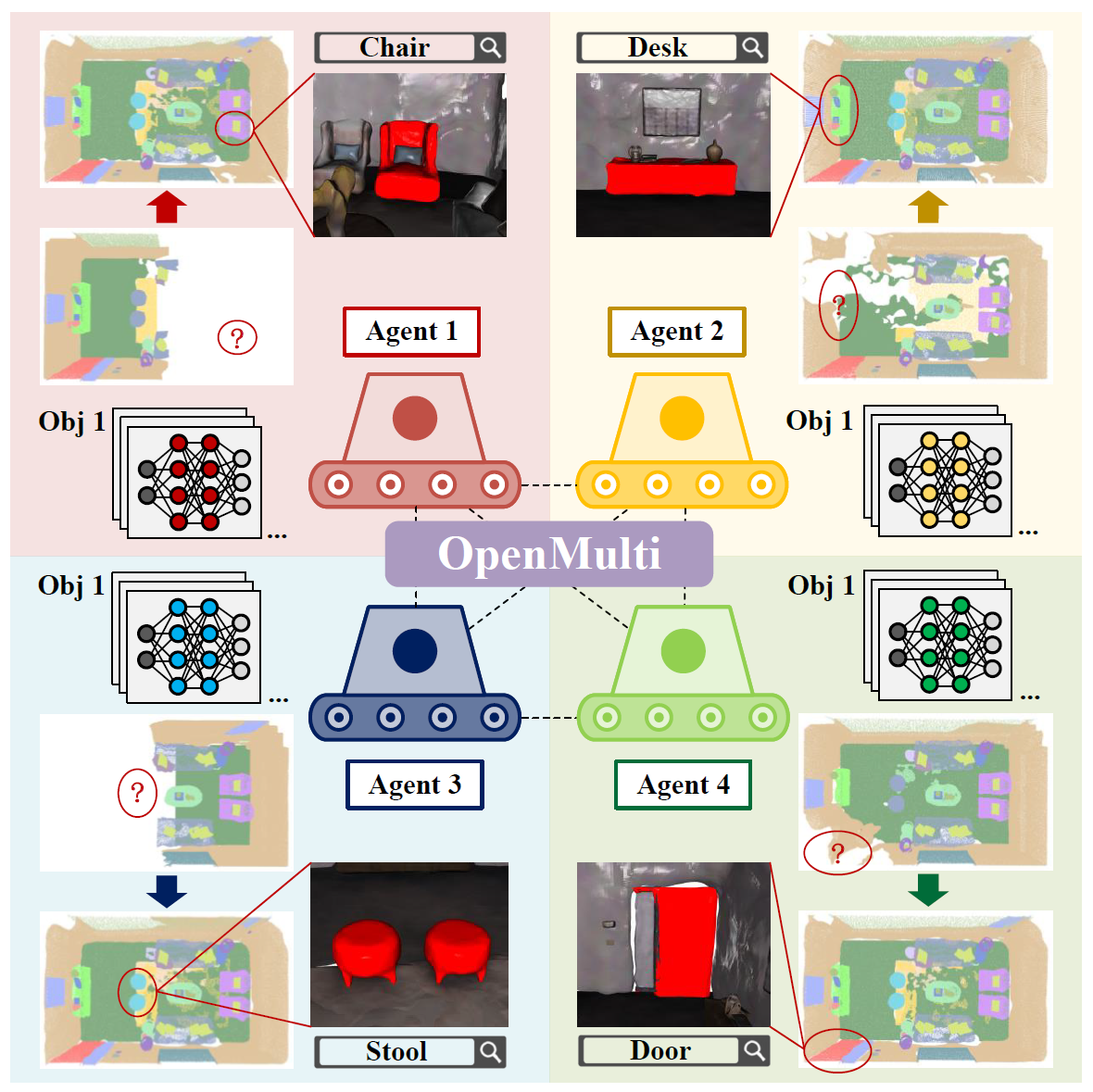
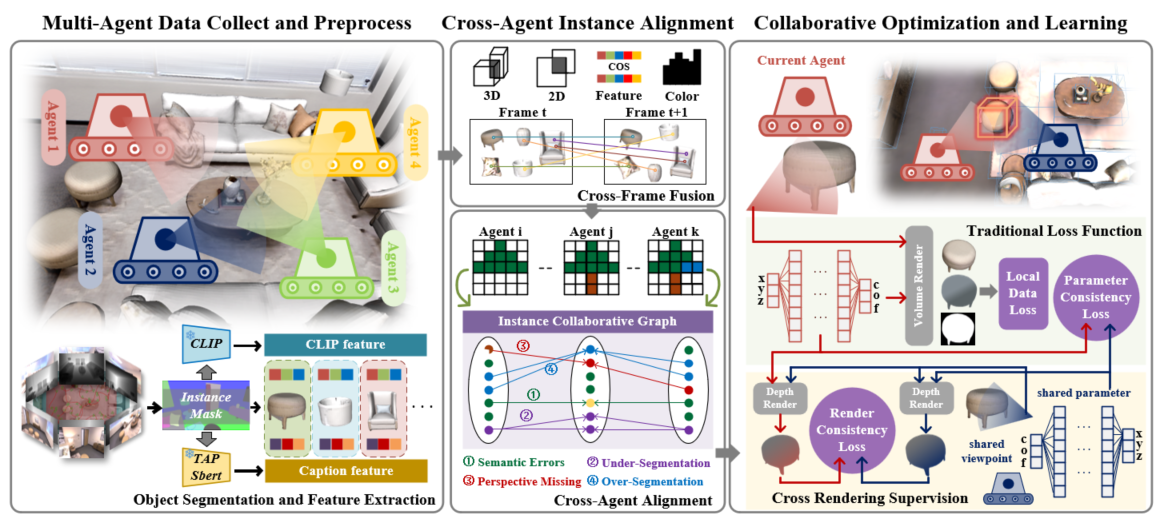
Multi-agent distributed collaborative mapping provides comprehensive and efficient representations for robots. However, existing approaches lack instance-level awareness and semantic understanding of environments, limiting their effectiveness for downstream applications. To address this issue, we propose OpenMulti, an open-vocabulary instance-level multiagent distributed implicit mapping framework. Specifically, we introduce a Cross-Agent Instance Alignment module, which constructs an Instance Collaborative Graph to ensure consistent instance understanding across agents. To alleviate the degradation of mapping accuracy due to the information compression problem, we leverage Cross Rendering Supervision to enhance distributed learning of the scene. Experimental results show that OpenMulti outperforms related algorithms in both finegrained geometric accuracy and zero-shot semantic accuracy. In addition, OpenMulti supports instance-level retrieval tasks, delivering semantic annotations for downstream applications.
The results of scene



visualisation of scene representation by our method.
OpenMulti demonstrates enhanced mapping accuracy over other collaborative mapping methods or distributed optimization algorithms.
OpenMulti outperforms centralized open-vocabulary mapping methods in most scenes.
Our ablation study demonstrates the effectiveness of Instance-Level Mapping and Cross Rendering Supervision in improving mapping accuracy.
OpenMulti demonstrates superior mapping accuracy under communication failure in simulated environments.
In real-world environments, OpenMulti also maintains commendable mapping accuracy under varying degrees of communication disruption.
OpenMulti demonstrates its robustness to communication failures from multiple perspectives within the scene.
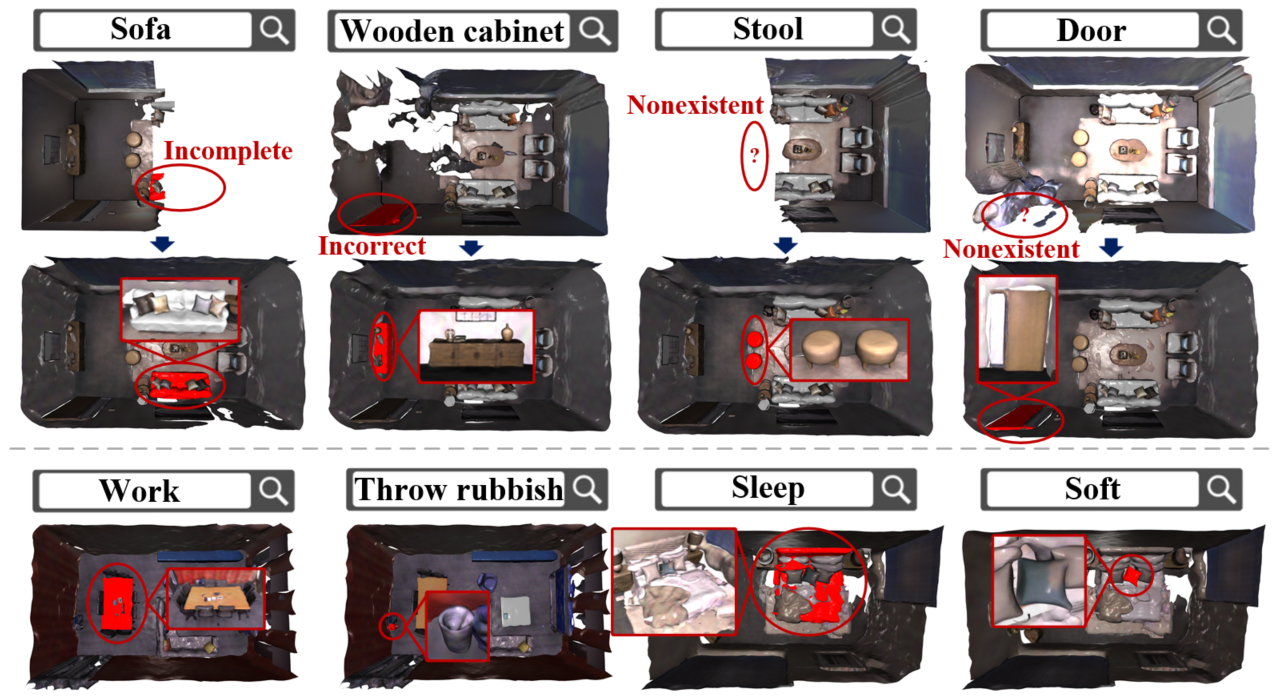
OpenMulti supports direct retrieval and associative retrieval tasks.